Il braccio robotico che si ispira al polpo
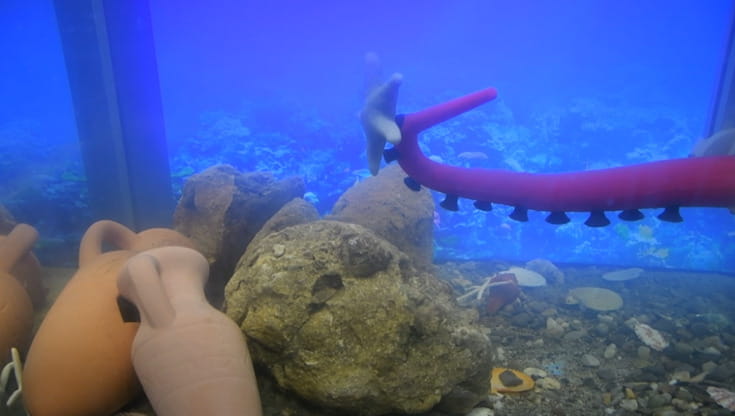 Il prototipo di braccio robotico ispirato a quello del polpo, sviluppato dall’Istituto Italiano di Tecnologia, integra sensori tattili nelle ventose per afferrare e manipolare oggetti in autonomia anche in ambiente acquatico. Lo studio è su Nature Machine Intelligence
Il prototipo di braccio robotico ispirato a quello del polpo, sviluppato dall’Istituto Italiano di Tecnologia, integra sensori tattili nelle ventose per afferrare e manipolare oggetti in autonomia anche in ambiente acquatico. Lo studio è su Nature Machine Intelligence